


TECHNICAL KNOWLEDGEBASE
【Basic Edition】 【はじめてのVirtuallab】
2023-01-31
レーザービーム集光のためのダブレットレンズの最適化

アプリケーション例の要約
設定の詳細
- 光源
− 非点収差IRレーザーダイオード
- 構成
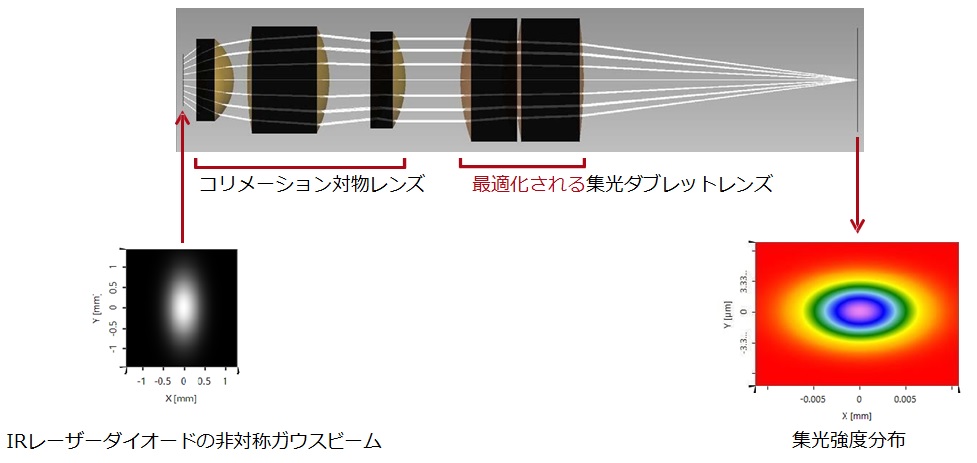
– コリメート後にダブレットで焦点を合わせる屈折レンズシステム
- ディテクタ
– スポットダイアグラム
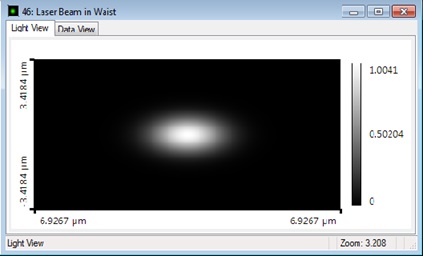
– 強度分布
– ビームパラメータ
- モデリング/設計
− 光線追跡:初期最適化
− フィールドトレーシング:さらなるスポットサイズの縮小
システムの図解
モデリングと設計の結果
ビームパラメータのパラメトリック最適化
| パラメータ | 光線追跡最適化の結果 | フィールドトレーシング最適化の結果 |
| 半径X | 8.57 µm | 8.45 µm |
| 半径Y | 5.01 µm | 4.77 µm |
まとめ
フィールドトレーシングに基づいた追加の最適化ステップを使用して、光線追跡によって得られたレンズ設計を改善する。
第一ステップ
後続のフィールドトレーシングの最適化に適した出発点を見つけるために、光線追跡シミュレーションを使用した高速の事前最適化
第二ステップ
回折効果を含む視野追跡を用いた精密な最適化

アプリケーション例の詳細 システムパラメータ
関連するアプリケーション例
このアプリケーション例は、関連事例から成る大きなグループの中の一つである。
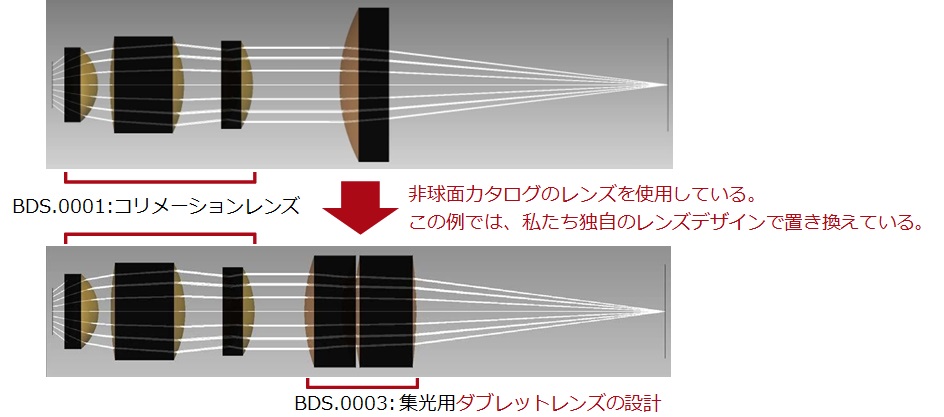
BDS.0001、BDS.0002およびBDS.0003は、屈折ビーム伝送システムを扱う
設計タスク
仕様:レーザーコンポーネントからのシングルモードIRダイオードレーザー
名称/タイプ:WSLD-1064-050m- 1-PD
波長:1064 nm
ビーム強度の発散:
10°× 20°(FWHM)
i.e. 8.49° × 16.99°
(1/e2を指す)
偏光:線形 (e.g. x軸に平行)
BDS.0001と同様
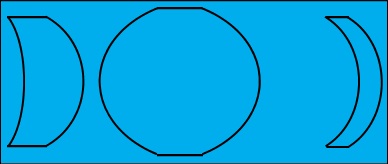
仕様:コリメーションレンズとその背後のライト
BDS.0001からのレンズ; その背後にあるビームパラメータ:
1/e2 半径 X × Y:936.22µm×1.8607mm
1/e2 発散角X × Y:0.021245° ×0.012396 °
X × Y方向のM2:1.0180 × 1.1802
波面エラーのRMS:~0.03λ
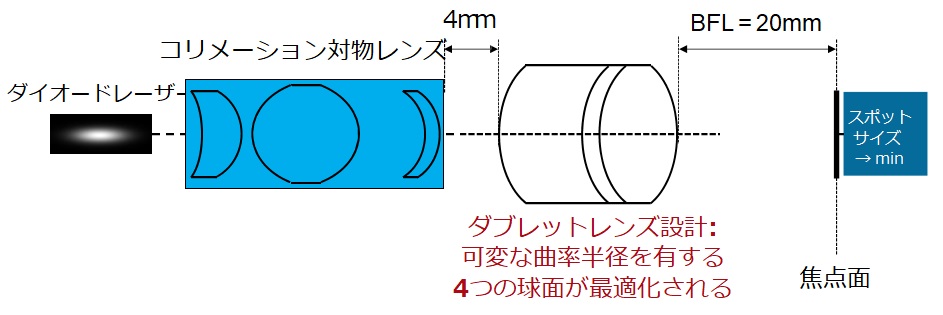
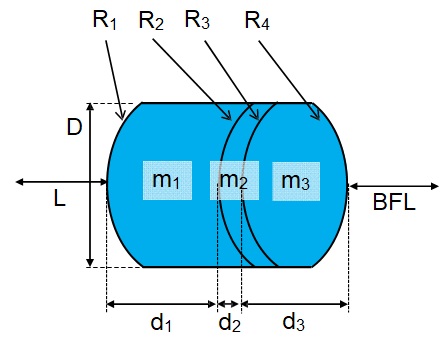
仕様:ダブレットレンズ
ダブレットレンズへの距離L:4 mm
距離(d1, d2, d3):(3, 1, 5) mm
希望のバックフォーカス(BFL):20 mm
全表面の直径D:9 mm
物質m1:N-BK7 (*)
物質m2:air
物質m3:SF6 (*)
初期曲率半径(R1, R2, R3, R4):each 10 mm
最適化のための曲率半径 の許容範囲| Ri |:[5 mm; 50 mm]
(*) カタログSchott 2014から
アプリケーション例の詳細 シミュレーションと結果
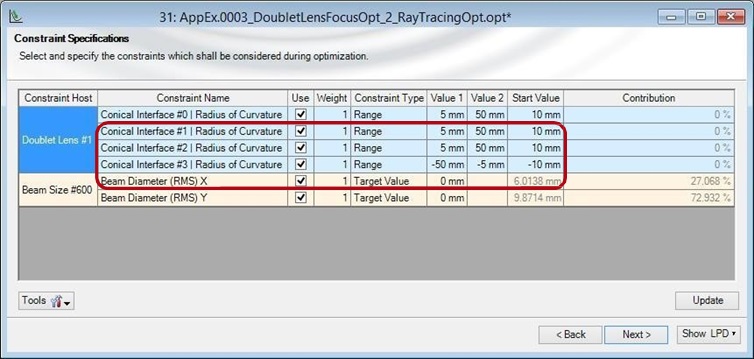
最適化する方法(事前設定)
- ダブレットレンズは、コリメートされたインプットビームがレンズの後ろ 20mmの距離で所与の条件の下で集光されるように最適化されるべきである。
- パラメトリック最適化ドキュメントを適用して、最小限の集光点が達成されるまで様々な曲率半径を有する反復シミュレーションを自動的に実行する。
- 全体の設定の最初の部分は変更されていないので、ダブレットレンズの直前で計算された配光分布を出発点として使用する。
- 集光点の評価のために、目標焦点面にビームサイズまたはビームパラメータディテクタを配置する。
光線追跡:事前最適化
- 光線追跡シミュレーションは、しばしばより高速になるという利点がある。
- したがって、VirtualLabの光線追跡エンジンを使用して、事前最適化 の最初のステップを実行する。その後、Classic Field Tracingエンジンを使用して結果を絞り込む。
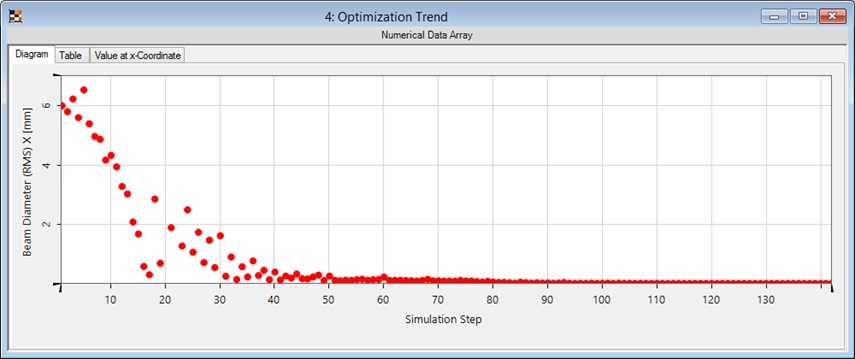
光線追跡:最適化プロセス
142の最適化ステップで、VirtualLabは4つの面の半径を変更し、光線追跡シミュレーションを使用して最小の焦点直径を検出した。
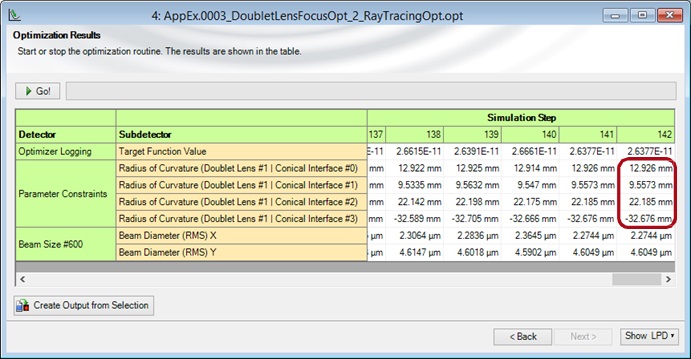
光線追跡:事前に最適化された焦点面
VirtualLabは、最適化のすべてのパラメータと結果を一覧表示する。.最後の列には、4つの面の事前に最適化された曲率半径が表示される。
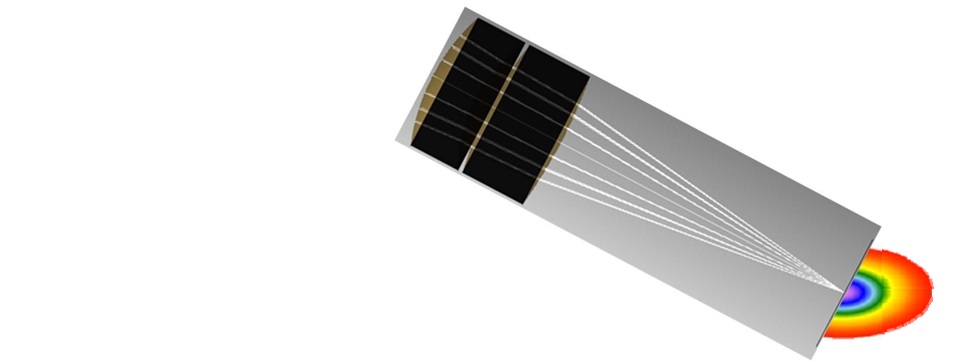
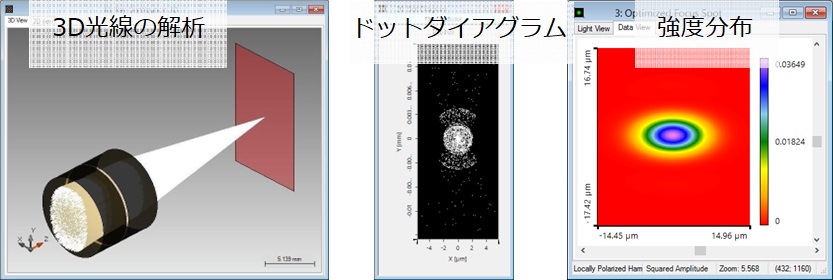
光線追跡:3D評価
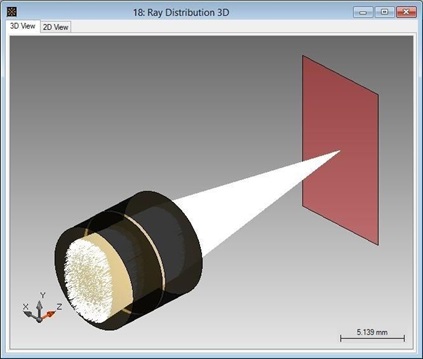
3D光線追跡システム解析は、予想される集光の挙動を示す。
光線追跡:焦点のスポットサイズ
光線追跡最適化の間にスポットサイズを評価するため、ビームサイズディテクタを使用した。
RMS値(セントロイドを参照)に応じたX方向およびY方向のビーム直径は次のとおりである。2.27 µm × 4.60 µm (回折限界より小さい)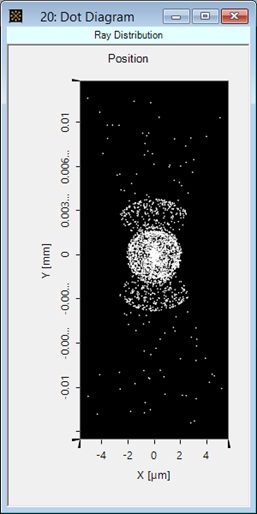
改善:光線追跡からフィールドトレーシング
- 幾何光学に基づくシミュレーションは、回折効果が主要な役割を 果たす現実的な配光を評価することはできない。
- これは焦点領域の場合である。
- フィールドトレーシングにより、すべての波動光学的な効果を考慮することができる。
したがって、フィールドトレーシングシミュレーションにより光線追跡の設計内容を確認し、改善することができる!
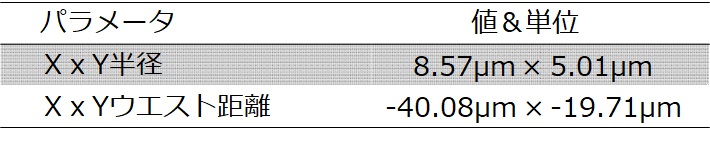
フィールドトレーシング:中間結果
- より意味のある結果を得るために、回折効果も考慮した物理光学的なフィー ルドトレーシングシミュレーションを行い、第2運動量理論に基づくビームパラメータディテクタを適用する。
- 視野追跡結果値「ウエスト距離X×Y」は、光線追跡最適化後の最適焦点位 置が回折効果のために理想的な20mmの距離にないことを既に示している。
- このようにして、フィールドトレーシングと事前に最適化された面データを初期値として2番目の最適化ステップを実行する。
フィールドトレーシング:最終最適化
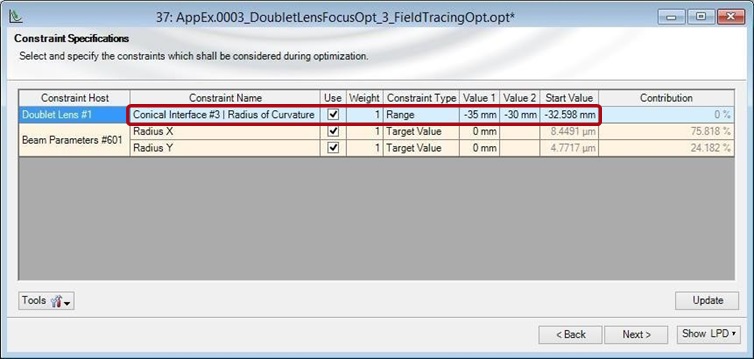
- 精密な最適化を行うステップでは、すべての面を変更する必要はない。最後の面を変更することのみを決定する。20mmの距離で実際に最適なフォーカスを得るということである。
- さらに、この微調整は、典型的にわずかな変化しか必要としないため、曲率半径の範囲をより小さく指定する。
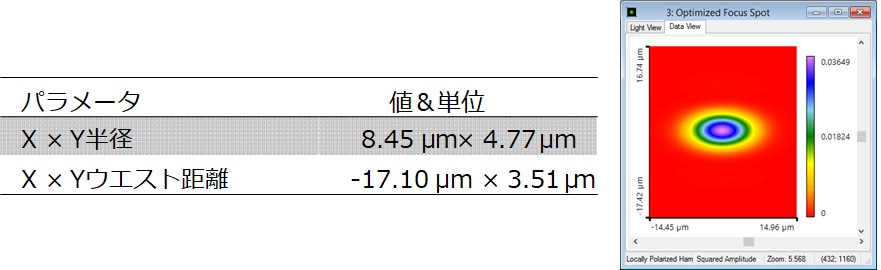
フィールドトレーシング:最終結果
最終面を最適化することにより、ビームウエストを所望の位置に近づけた。したがって、焦点スポットはさらに小さくなる。
この低NAシステムであっても、フィールドトレーシングは、最終的な焦点スポット半径を0.12μm×0.24μm(1.4%×4.8%)改善することができた:
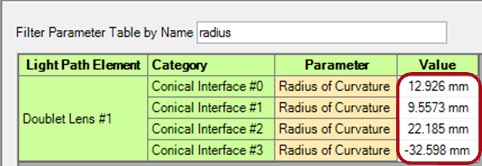
結果の比較(第1 vs第2ステップ)&半径
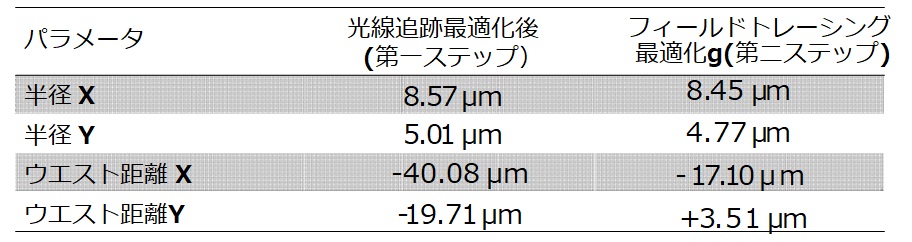
このパラメータの概要は、レンズダブレットを構築する4つのコーニカル面の最終的な曲率半径を示している。
まとめ
フィールドトレーシングに基づいた追加の最適化ステップを使用して、光線追跡によって得られたレンズ設計を改善する。
第一ステップ
後続のフィールドトレーシングの最適化に適した出発点を見つけるために、光線追跡シミュレーションを使用した高速の事前最適化
第二ステップ
回折効果を含む視野追跡を用いた精密な最適化
参考文献
Get Started 動画:
-
- Introduction to the Light Path Diagram
- Introduction to the Parameter Run
- Introduction to Parametric Optimization